2. MOVEMotor module
The MOVEMotor module is required to control the MOVEmotor buggy.
There are 2 major versions of the MOVEMotor: v2 and v3.1
They have different chip sets to control the motors and so have different coding in their modules.
Download the v2 module file
MOVEMotor_v2.py module.or
Download the v3.1 module file
MOVEMotor_v31.py module.After downloading, rename the file to MOVEMotor.py so that importing the module works using the code below.
To use the MOVEMotor module, import it via:
import MOVEMotor.from microbit import *
import MOVEMotor
2.1. Uploading modules to the microbit
The standard online micropython editor is at: https://python.microbit.org/v/3.
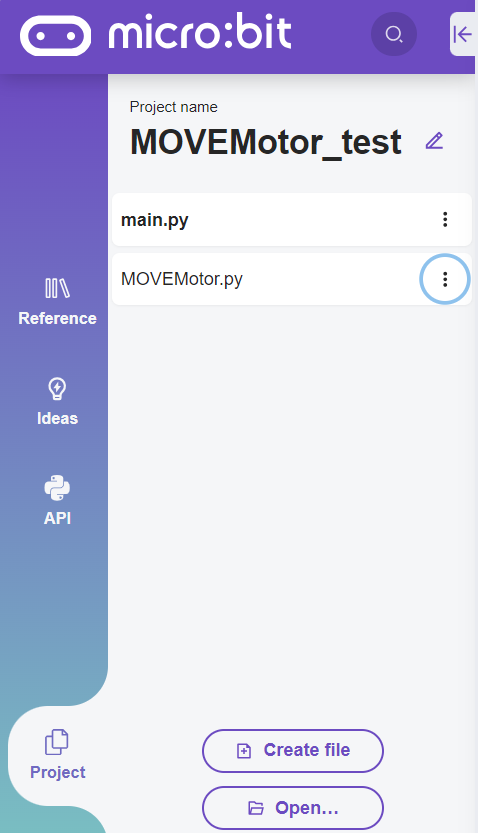
Create a project.
The main.py file is where you place any code to flash to the microbit.
A blank module file, such as MOVEMotor.py can be created using the Create file button. Code can be typed in or pasted in to that file.
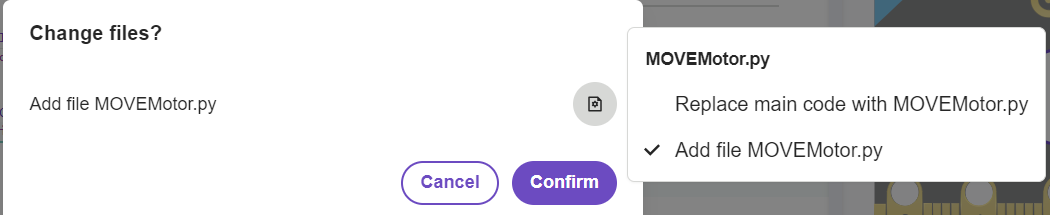
Alternatively, a previously created module file can be added using Open.
In doing so a dialog will ask whether to replace the main file with that file. Click on the right hand icon instead, and choose Add file … Then click Confirm.