3. Bot radio v3 - KitronikGameController
3.1. Unique groups
Use
radio.config(group=8) to set unique groups in the room.Make sure all microbits using a bot have the same group number (0-255).
Edit the code below to set the group.
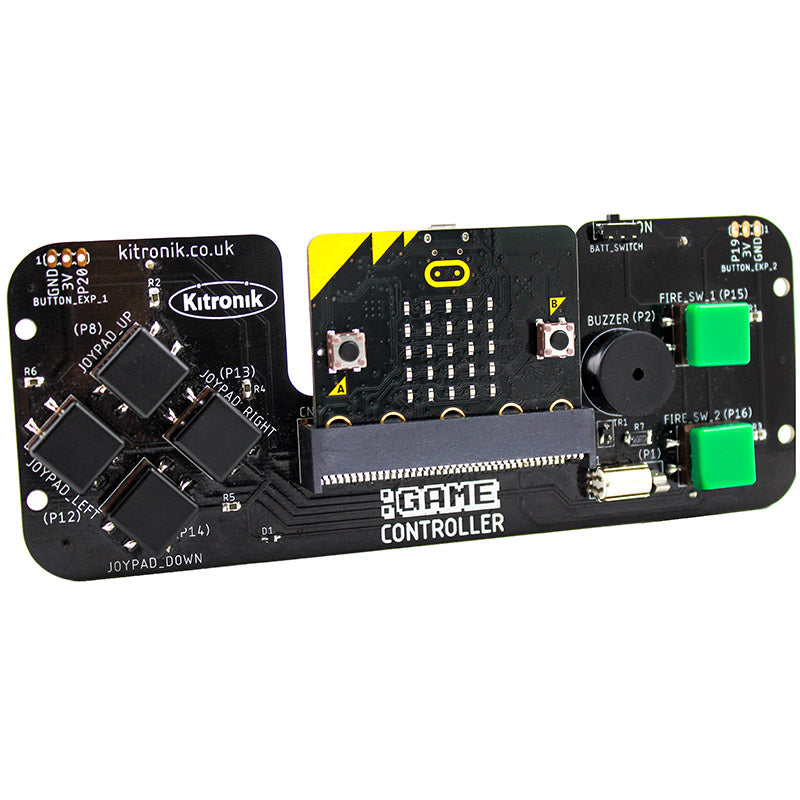
3.1.1. Using Kitronik Game Controller for variable speeds
3.2. Radio for controller
The code below requires A button pressing for motor control.
No durations are set, so the motors will continue running with the last instruction they receive.
To stop, press the microbit A or B button, send: X.
For increasing speed forward, send: F, G, H.
Press the joypad UP button, F is sent, and a slow speed results.
Hold down the FIRE SW 1 button, and press the joypad UP button, G is sent, and a medium speed results.
Hold down the FIRE SW 2 button, and press the joypad UP button, H is sent, and a fast speed results.
For increasing speed backward, send: B, C, D
Press the joypad DOWN button.
For increasing speed left, send: L, M, N
Press the joypad LEFT button.
For increasing speed right, send: R, S, T
Press the joypad LEFT button.
from microbit import *
import music
import radio
radio.config(group=8) # 0-255
radio.on()
# Class to drive Kitronik :GAME Controller
class KitronikGameController:
# This function will be called when a class instance is created
def __init__(self):
self.musicPin = pin2
self.Up = pin8
self.Down = pin14
self.Left = pin12
self.Right = pin13
self.Fire_1 = pin15
self.Fire_2 = pin16
# Determines whether a particular button has been pressed
# (returns True or False)
def onButtonPress(self, button):
if button.read_digital() == 0:
return True
else:
return False
controller = KitronikGameController()
while True:
msg=""
if button_a.is_pressed():
msg = "X"
elif button_b.is_pressed():
msg = "X"
elif controller.onButtonPress(controller.Fire_2) is True:
if controller.onButtonPress(controller.Up) is True:
msg = "H"
elif controller.onButtonPress(controller.Down) is True:
msg = "D"
elif controller.onButtonPress(controller.Left) is True:
msg = "N"
elif controller.onButtonPress(controller.Right) is True:
msg = "T"
elif controller.onButtonPress(controller.Fire_1) is True:
if controller.onButtonPress(controller.Up) is True:
msg = "G"
elif controller.onButtonPress(controller.Down) is True:
msg = "C"
elif controller.onButtonPress(controller.Left) is True:
msg = "M"
elif controller.onButtonPress(controller.Right) is True:
msg = "S"
else:
if controller.onButtonPress(controller.Up) is True:
msg = "F"
elif controller.onButtonPress(controller.Down) is True:
msg = "B"
elif controller.onButtonPress(controller.Left) is True:
msg = "L"
elif controller.onButtonPress(controller.Right) is True:
msg = "R"
radio.send(msg)
display.show(msg)
3.3. Radio for microbit on MOVEMotor
There are 3 speed settings.
When turning, the slowest speed has a tighter turn; the fastest speed has a less tight turnning circle.
from microbit import *
import radio
import MOVEMotor
radio.config(group=8) # 0-255
radio.on()
# setup buggy
buggy = MOVEMotor.MOVEMotorMotors()
while True:
msg = radio.receive()
if msg is not None:
if msg == "B":
buggy.backwards(speed=2)
elif msg == "C":
buggy.forwards(speed=5)
elif msg == "D":
buggy.forwards(speed=10)
elif msg == "F":
buggy.forwards(speed=2)
elif msg == "G":
buggy.forwards(speed=5)
elif msg == "H":
buggy.forwards(speed=10)
elif msg == "X":
buggy.stop()
elif msg == "L":
buggy.left(speed=2, radius=25)
elif msg == "M":
buggy.left(speed=3, radius=15)
elif msg == "N":
buggy.left(speed=4, radius=5)
elif msg == "R":
buggy.right(speed=2, radius=25)
elif msg == "S":
buggy.right(speed=3, radius=15)
elif msg == "T":
buggy.right(speed=4, radius=5)
3.4. Turning backwards
Tasks
Add B button pressing to allow backwards movement while turning.